Mark Point Positioning and Tracking System
System Overview
The Marker Positioning and Tracking System adopts a proprietary hardware and software architecture developed by Vizum. It uses the ViEye (a binocular stereo camera) to perform 3D spatial positioning, tracking, and pose detection of stationary or moving markers. The markers can be designed as either active infrared or passive types, effectively eliminating interference from ambient lighting and making the system suitable for both indoor and outdoor environments. The system features intelligent terminals, modular design, high-speed motion tracking of markers, large depth-of-field detection, ease of use, and high flexibility.

System Features
- Intelligent Terminal: Supports direct output of marker coordinates and pose data from the camera.
- High-Precision Positioning: Achieves millimeter-level depth accuracy even at a working distance of up to 5 meters.
- High-Speed Processing: In full-frame detection mode, the system can output positioning coordinates of mark points at 16 frames per second.
- No Motion Blur or Smearing: Equipped with a global shutter camera to ensure high-quality image capture of fast-moving markers.
- Multi-Marker Positioning and Tracking: Capable of locating and tracking multiple mark points simultaneously within the field of view.
- Multi-Camera Stitching and Positioning: Supports stitching multiple cameras to expand the field of view and depth range for large-scene tracking applications.
- Strong Environmental Adaptability: Based on binocular stereo vision, with infrared active lighting and optical filters to ensure stable image capture under varying lighting conditions.
- Wide Field of View: Supports interchangeable lenses with various focal lengths to meet different field-of-view requirements.
- Large Depth of Field: Supports positioning at distances over 10 meters.
- Flexible Detection Zone Configuration: Users can flexibly define detection regions based on the actual field of view to filter out irrelevant areas.
- Easy to Operate: Compact and highly flexible design, easy to install and integrate, and unaffected by changes in installation height or angle.
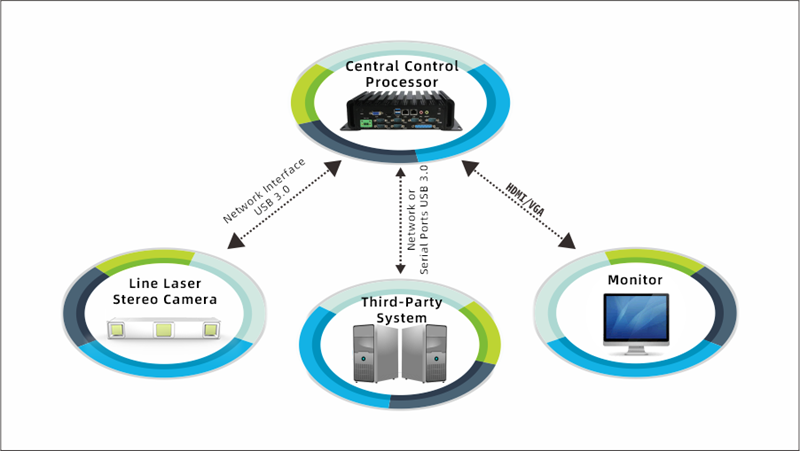
System Communication Diagram
When externally or manually triggered to operate continuously, the system utilizes a binocular stereo camera to rapidly capture images of moving markers. The captured data is transmitted via Ethernet to the central control processor, which then processes the information to obtain the 3D spatial coordinates and pose of each marker. The results can be displayed on a monitor through a display interface and transmitted to third-party systems via network interface for data exchange and system integration.
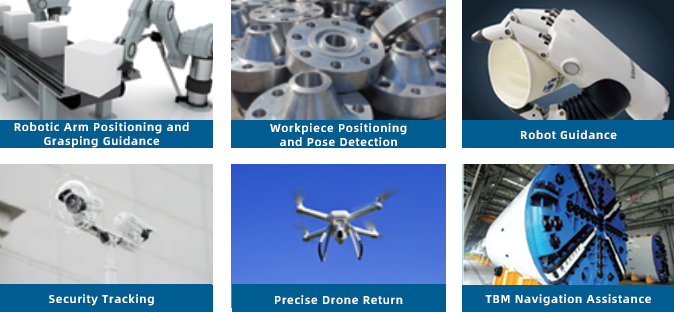
System Applications